
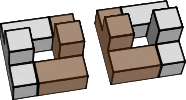
Figure: Pieces, Resuls and solutions for a Puzzle
Before we start describing the functions of BURRTOOLS, let's synchronise our use of vocabulary and explain a few concepts that are crucial to the way BURRTOOLS works.
As described above, BURRTOOLS works with shapes which are merely a collection of voxels that each can have either one of three different states: empty, fixed or variable. Particularly the difference between fixed and variable voxels has a great impact on the way the solver works and which assemblies are considered to be valid and which are not. Besides that, the validity of solutions can be further restricted by imposing colour constraints.
Colours allow you to add constraints to the possible placement of pieces. This is done by assigning a colour to one or more voxels of the piece(s) and the result shape (→ Adding Colour). Then you can set some colour placement conditions for each problem (→ Colour Constraints). The program will place pieces only at positions that fulfil the colour conditions defined.
These colour conditions currently allow the definition of what coloured voxels of the pieces may go into what coloured voxels in the result shape. The default colour is special: it always makes a colour match. Voxels in a piece that are in the default colour fit everywhere and default coloured voxels in the result shape can accommodate any piece voxel, independent of its custom colour.
Currently the assigned colour is interpreted as painting the whole voxel with this colour, but in the future more advanced possibilities for colouring and conditions may be added.
This chapter contains some advanced material that might not be suitable or understandable for first time readers. So you might skip it for the moment. It is advisable though that you finally read and understand the information given in the following sections as otherwise you might get into trouble interpreting analysis results.
The way BURRTOOLS handles symmetries in the result shape and the found assemblies tries to be as close to "normally expected behaviour" as possible. But sometimes it does strangely, unexpected things. To understand that you need to know how BURRTOOLS goes on removing rotated solutions.
BURRTOOLS tries to avoid finding rotations of solutions in the first place by placing certain pieces in only a few of its possible rotations. But this method doesn't work in all cases so a more general solution needs to be found that can detect rotated or inflected solutions and drop them when they are found by the assembler.
As said this filter is placed after the assembler and before further processing (disassembling, sorting into solution lists) of the found assemblies is done. To be usable the filter must have one important property: it must be independent of the already found assemblies. So what is not working is to save a list of all found assemblies and compare the new one with the entries of this list.
Apart from getting very slow when the list is becoming long, it requires that all assemblies are saved and this can be a real problem when there is a huge amount of assemblies for a problem.
So an other approach had to be used. This method works by "normalizing" assemblies and only allowing normal assemblies to pass the filter all other assemblies are blocked.
Normalizing in this case means to be able to always find one special orientation out of all possible orientations of an assembly. If we, for example, start with 2 assemblies that are identical assemblies with different orientations. Each of these 2 assemblies has a list of other possible orientations. The list do contain the same entries but in a different order due to the different starting orientation. We must now be able to independently identify one special orientation from both lists. And those selected orientations must be identical.
This is achieved by applying a comparison operation on the assemblies and choosing the smallest or the biggest assembly.
Once we have this operation we implement our filter by only letting through assemblies that are identical to the "smallest" orientation out of all of its orientations.
It is obvious that this filter blocks all bot one assembly when fed with all possible orientations of one assembly.
This filter also works when removing inflections (mirror solutions) of an assembly. For that it needs an additional thought though. After mirroring an assembly it might happen that pieces that are not mirror symmetric become invalid. They changed shape and became their own mirror shape.
This, of course, is a different assembly, maybe even a different puzzle so we need to try to rectify this by replacing pieces with their mirror shape, if that shape is available. So what we do is that we go through all pieces in the assemblies and check if a piece is placed in a mirror orientations. If that is the case we search if we have a piece with mirror shape for the current piece and exchange those 2 pieces. The new piece is then placed in a non-mirror orientation. If we have been able to remove all mirror orientated pieces from the assembly we got a valid new orientation that will go into the comparison operation. If there are pieces left in mirror orientation, the whole assembly is invalid and will not go to the comparison.
Now all this sounds like a good thing and it works pretty well, but it has some important consequences that will be explained in the next section.
This is probably the most important consequence of the rotation removal algorithm. When not considered it will result in useless statistics about puzzle solutions and generally rubbish puzzle analyses.
As we have seen BURRTOOLS will exchange pieces in the process of trying to eliminate mirror solutions from a list of assemblies. This manipulation will lead to unexpected results like missing solutions or different counts of solutions containing a certain piece.
To understand that have a look at the figure Mirror Paradox Example You can see 2 solutions to a simple puzzle. Each solution contains 2 pieces. On closer inspection you will see that each solution uses 2 identical pieces but the 2 solutions each use 2 different sets of 2 pieces each. The 2 piece pairs of the 2 solutions are mirror shapes of one another.
When the mirror removal of BURRTOOLS is enabled BURRTOOLS will only
display one of the 2 solutions. To explore this you can have a look at
the demo file demoMirrorParadox.xmpuzzle included in the
examples of BURRTOOLS.
This explains different numbers of solutions that contain the various pieces. The overall number of solutions will be constant but the number of solutions that contain a certain piece may vary depending on the actual implementation of the "smaller" operation of the rotation removal filter.
To avoid this problem it is best to know when exactly is may happen and when not. Here is a list of conditions:
And now we need to know what to do about it. The first possibility is to change your puzzle so that the problem can not happen. If that is not possible you must check the checkbox Keep Mirror Solutions.
Due to the nature of the rotation removal algorithm is may happen that the first solutions found don't pass the filter. For big solutions with a big number of pieces this waiting time might even be very long.
If you just want to know if there are solutions and don't need the precise number you can check the checkbox Keep Rotated Solutions. In this case the rotation removal filter is disabled and all found assemblies pass.
When I explained the Rotation Removal Algorithm I intentionally left out one fact: BURRTOOLS will not create all possible orientations of the assemblies but only those orientations that are required. Required are the rotations that are in the symmetry of the result shape.
Normally a found rotation will fill up the result shape pretty well, it will also normally have an identical outer appearance which means that the found assemblies will have the same symmetry as the result shape. This fact is used to save some work. Only those orientations are considered that are part of the symmetry of the result shape.
Now this works pretty well in most situations. In some cases though it is necessary to do a more complete analysis and remove more solutions. For example: imagine are single cube is to be put into a 4x4 square. Everybody will agree that there is just one solution. BURRTOOLS will find 3. In one solution the cube is in the corner, one solution has the cube on the edge and one solution places the cube into the middle of the square.
All 3 solutions are identical in external appearance. For BURRTOOLS though they are different because BURRTOOLS always looks at the found solution in relation to the result shape.
Sometimes this is not what we need. In that case you will need a more thorough analysis that will remove all possible orientations and also translations of the solution so that no 2 solutions exist that are just a translation, rotation, mirror or a combination of those 3 of one another.
For this the above explained filter will always create all possible rotations and additionally will shift those orientations so that they are closest to the origin before submitting the result to the comparison operation.
BURRTOOLS can do that. See chapter Solver Settings for how to activate this functionality and chapter Piece Generation for an example of its use.